By: Drew MacFarlane, Jake Eger & Matthew Dietz
Adviser: Dr. O. Hernandez
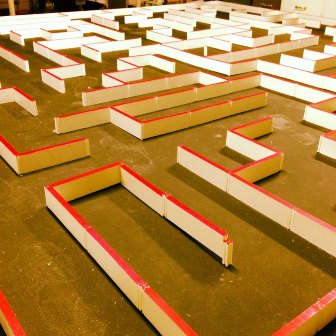
The goal of the Micromouse project is to design and build an autonomous robotic vehicle that will solve a maze. The mouse will be entered into the IEEE region 1 Micromouse competition. The mouse must find the best path to the center of the maze and complete the maze in the shortest time to win the competition. The mouse needs an efficient algorithm to solve the maze. Using OpenGL, a simulator has been developed throughout the fall semester to simulate our goals for the physical mouse. The main focus of this project will be to solve the maze efficiently and then focus on improving speed once that has been accomplished.